Adaptive And Reliable GPS Uncertain Position Estimation an Insightful Oceanography and Geography Applications
DOI:
https://doi.org/10.17762/ijcnis.v14i2.5481Keywords:
Statistical signal processing, uncertain GPS, geography, receiver-estimationAbstract
Location evaluation applications are one of the most imperative services in GPS position applications. The Global Positioning Systems (GPS) is a versatile and legacy technology has been providing a reliable and accurate position of objects on Earth. The uncertain GPS position is considered an initialization parameter for many inherent systems in today’s world. This initialization position estimate has a wide variety of applications such as Coast line maps, understanding the geo-dynamical phenomena such as volcanic eruptions, earthquakes and subsequent originating source mechanisms, Mean Sea level estimation for contours of land surfaces, Oceanic en-route as well as in mobile and Vehicular technologies etc. The validation and reliability of the results of all those applications is dependent on the accuracy of the position estimate given by GPS. In this work an attempt is made to retrieve accurate and reliable position parameters from GPS by correcting the measurement errors for all the visible satellites at every epoch. The maximum and minimum pseudo ranges in L2 signal observed are 2437404.2 meters and -76295.22 meters.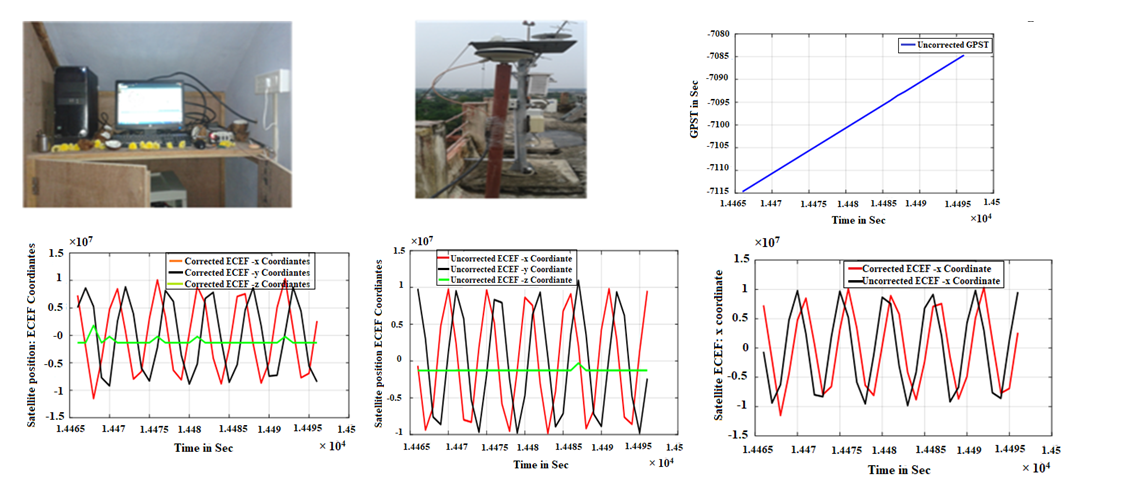
Downloads
Published
2022-08-31
How to Cite
Kiran, K. U. ., & K.S. Ramesh, S. K. R. . (2022). Adaptive And Reliable GPS Uncertain Position Estimation an Insightful Oceanography and Geography Applications. International Journal of Communication Networks and Information Security (IJCNIS), 14(2), 83–98. https://doi.org/10.17762/ijcnis.v14i2.5481
Issue
Section
Research Articles
License
Copyright (c) 2022 Author

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.