Autonomous Underwater Vehicle: 5G Network Design and Simulation Based on Mimetic Technique Control System
DOI:
https://doi.org/10.17762/ijcnis.v14i3.5566Keywords:
Autonomous Underwater Vehicle (AUV), Memetic Algorithm, Clustering, Trajectory Estimation, 5G communicationAbstract
The Internet of Underwater Things (IoUT) exhibits promising advancement with underwater acoustic wireless network communication (UWSN). Conventionally, IoUT has been utilized for the offshore monitoring and exploration of the environment within the underwater region. The data exchange between the IoUT has been performed with the 5G enabled-communication to establish the connection with the futuristic underwater monitoring. However, the acoustic waves in underwater communication are subjected to longer propagation delay and higher transmission energy. To overcome those issues autonomous underwater vehicle (AUV) is implemented for the data collection and routing based on cluster formation. This paper developed a memetic algorithm-based AUV monitoring system for the underwater environment. The proposed Autonomous 5G Memetic (A5GMEMETIC) model performs the data collection and transmission to increase the USAN performance. The A5GMEMETIC model data collection through the dynamic unaware clustering model minimizes energy consumption. The A5GMemetic optimizes the location of the nodes in the underwater environment for the optimal data path estimation for the data transmission in the network. Simulation analysis is performed comparatively with the proposed A5Gmemetic with the conventional AEDG, DGS, and HAMA models. The comparative analysis expressed that the proposed A5GMeMEMETIC model exhibits the ~12% increased packet delivery ratio (PDR), ~9% reduced delay and ~8% improved network lifetime.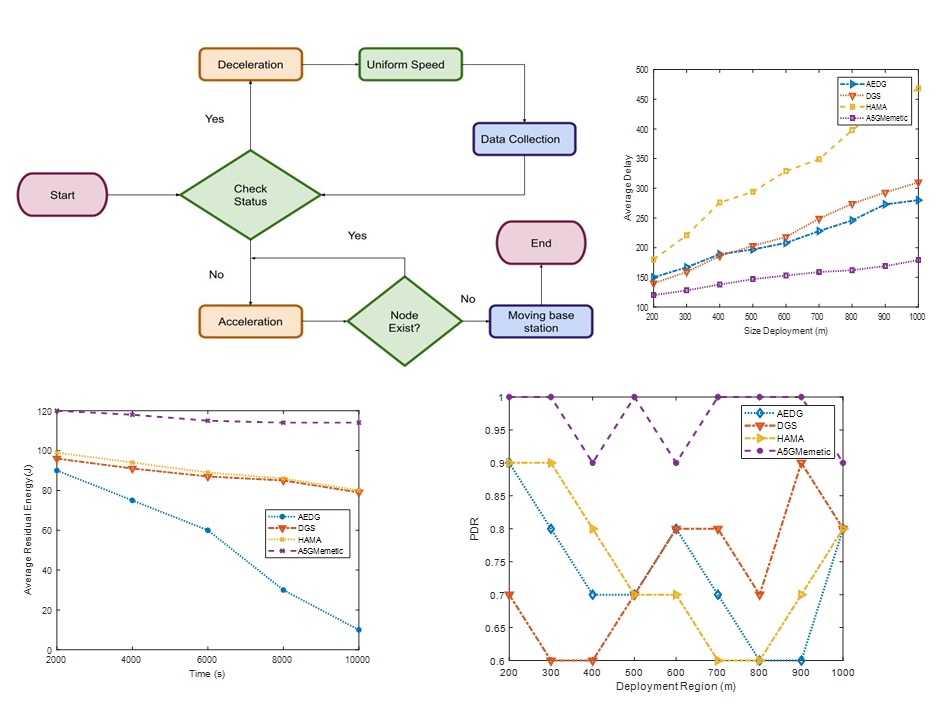
Downloads
Published
2022-12-23
How to Cite
Castro-Cayllahua, F. ., Carhuancho, J. L. M. ., Díaz, C. M. F. ., Inga, Z. M. C. ., Rasheed, T. ., & Cotrina-Aliaga, J. C. . (2022). Autonomous Underwater Vehicle: 5G Network Design and Simulation Based on Mimetic Technique Control System. International Journal of Communication Networks and Information Security (IJCNIS), 14(3), 01–15. https://doi.org/10.17762/ijcnis.v14i3.5566
Issue
Section
Research Articles
License
Copyright (c) 2022 Author

This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License.